Welcome! We have created OpenExo, an open-source exoskeleton platform for mobility and rehabilitation research. All of our mechanical designs, electrical components, software architecture, control, optimization, and biofeedback schemes are freely available. Our vision is that OpenExo will rapidly accelerate the development and testing of new exoskeleton designs and control schemes for real-world and clinical settings.
We are truly excited to help you with your exoskeleton project. Thank you in advance for your patience as we continue to improve.
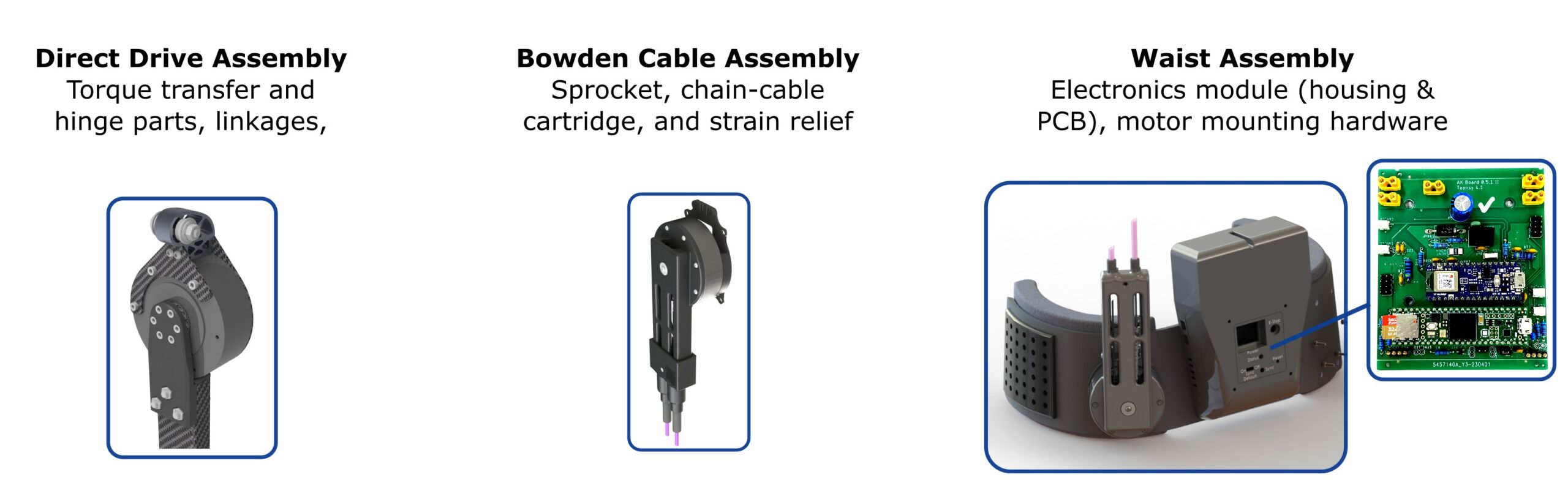
Mechanical Hardware. Our hardware platform was designed to be modular, allowing for a variety of direct drive and Bowden cable transmission systems. Example configurations include direct drive hip and ankle devices, and/or Bowden cable ankle and elbow devices. OpenExo supports a variety of different motors, including the Cubemars AK series, and a range of Maxon motors. Depending on the motor selection and transmission type, the cost for materials and supplies of each actuated joint is $1-2k.
Electrical Hardware. We have a variety of different PCB designs each supporting different motors, wired communication protocols, and sensors (e.g., pressure, inertial, torque, and encoder).
Software. The OpenExo software package includes firmware for the exoskeleton control module, a python GUI, and command line API. Exoskeleton data is transmitted wireless via BLE.
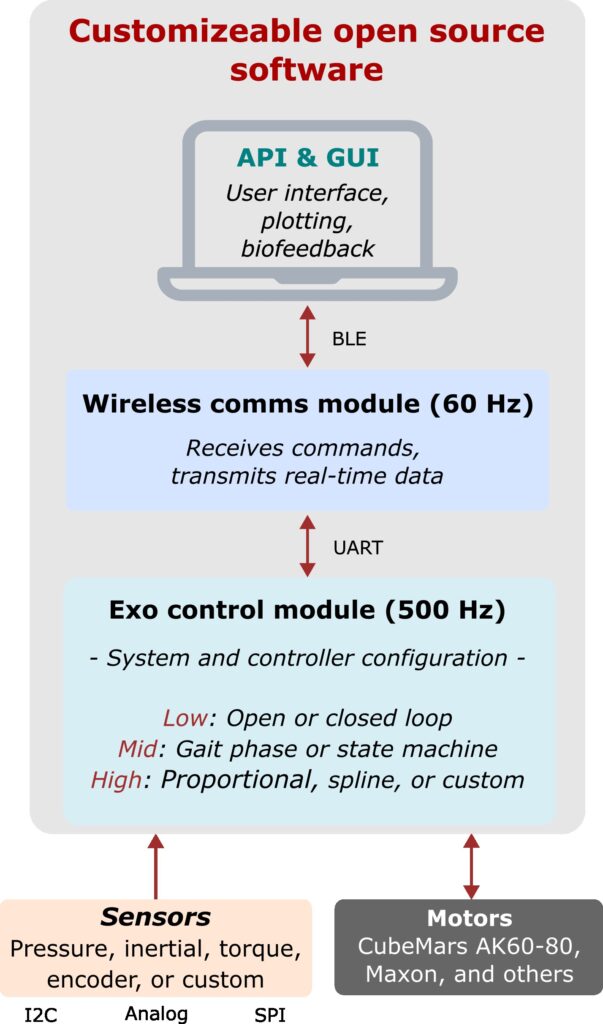
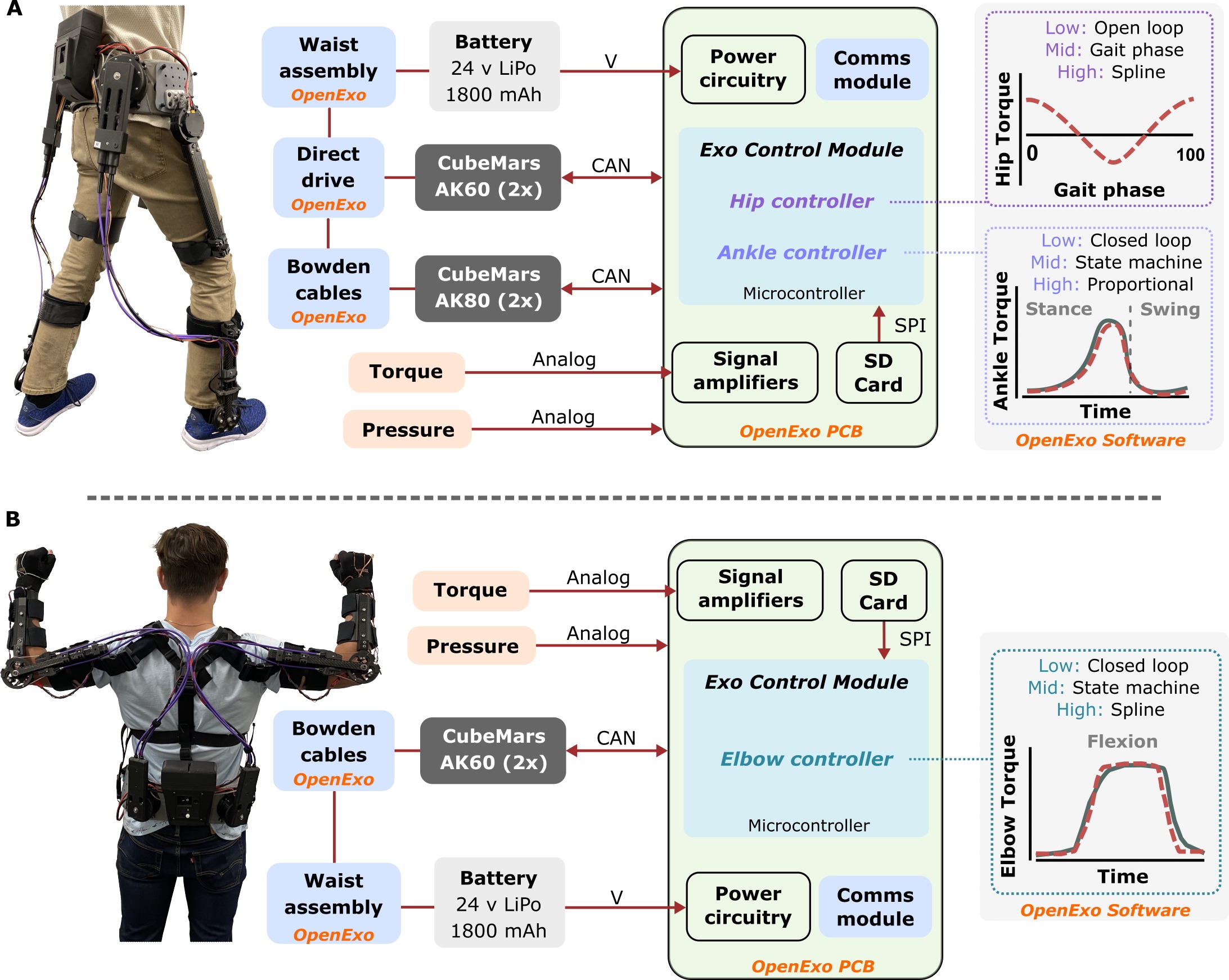
Low level control
Control your motors using open-loop or closed-loop (torque feedback) control.
Mid level control
Use a gait phase estimator or finite state machine.
High level control
Select from our library of previously published high-level control schemes.
Example configurations
See our publication for OpenExo benchmarking and research results:

Join our growing community of registered projects!